Probabilistic Slide-support Manipulation Planning in Clutter
Shusei Nagato, Tomohiro Motoda, Takao Nishi, Petit Damien,
Takuya Kiyokawa, Weiwei Wan, and Kensuke Harada,
in IROS, 2023. (Accepted!)
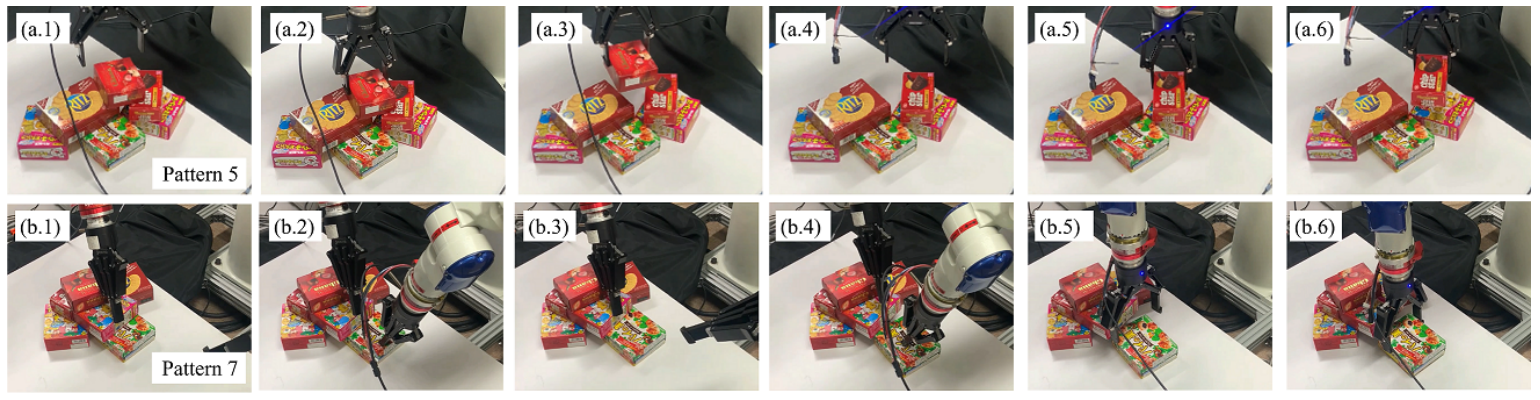
To safely and efficiently extract an object from the clutter, this paper presents a bimanual manipulation planner in which one hand of the robot is used to slide the target object out of the clutter while the other hand is used to support the surrounding objects to prevent the clutter from collapsing.
Our method uses a neural network to predict the physical phenomena of the clutter when the target object is moved. We generate the most efficient action based on the Monte Carlo tree search.
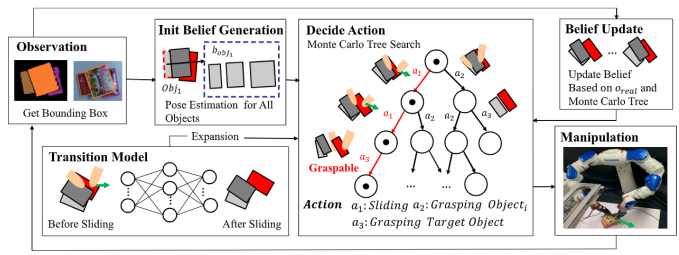
The grasping and sliding actions are planned to minimize the number of motion sequences to pick the target object. Experiments with a real bimanual robot confirmed that the robot could retrieve the target object, reducing the total number of motion sequences and improving safety.